Community meeting: MOV.AI Flow ROS IDE (Apr 2022)
Hi, community! ![]()
Next week we’re excited to welcome MOV.AI at our monthly community meeting!
MOV.AI Flow
Do you need to quickly start simulating robots but don’t know how?
MOV.AI is releasing Flow™ - a source available software - to the community. It is a new web based IDE that simplifies ROS development and execution, fully integrated with Gazebo. Robots and ROS Nodes are represented by drag-and-drop blocks with I/Os that can be linked to build complex state machines.

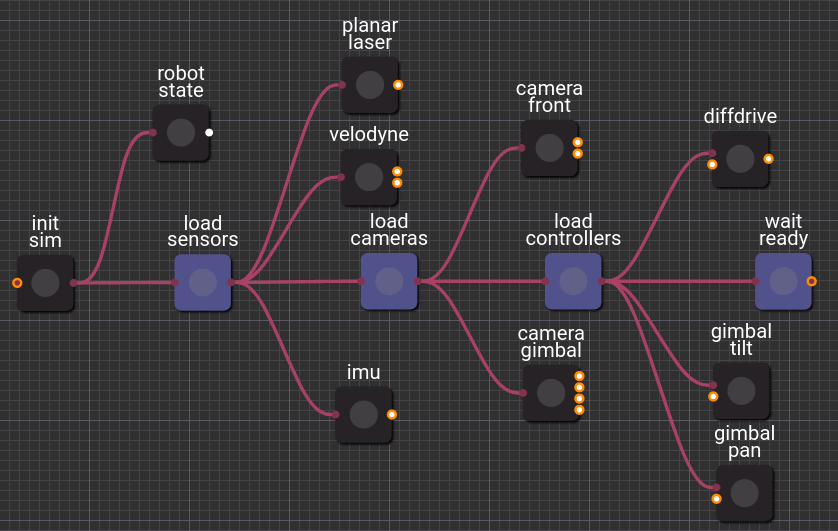
The session is intended for anyone developing Robots - from novices to senior developers - and will serve to show how you can give life to your simulated robots from AMRs to robot arms, or from submarines to drones. Simply drag and drop Flow robot drivers, and you are able to control your simulated robot, as well as read its many sensors. You’ll learn how to quickly deploy ROS bridges and from there develop your own complete sim robot drivers. Spoiler Alert: You don’t need a terminal, roslauncher nor a single command line! They will also present a very handy GUI - the Fuel World Launcher.




Meeting details
![]() Date: 2022-04-27T17:00:00Z
Date: 2022-04-27T17:00:00Z
![]() Place: Virtual at Google Meet
Place: Virtual at Google Meet
![]() Event: Gazebo community calendar
Event: Gazebo community calendar
![]() Topic: MOV.AI Flow ROS IDE
Topic: MOV.AI Flow ROS IDE
![]() Agenda: Everyone is welcome to add items to the agenda.
Agenda: Everyone is welcome to add items to the agenda.
As always, the meeting will be recorded and posted to the community meetings playlist on the GazeboSim YouTube channel. Check out the playlist for past meetings!
Are you doing anything interesting with Gazebo? Show it off to the community! Send me a private message so we can figure out the best date.
Do you want to see some specific topic covered? Please comment below!
See you then!
![]() Gazebo Development Team
Gazebo Development Team ![]()
")
